A powerful and very fast programmable digital micromotor with titanium gears and an output shaft mounted on two plain bearings; a magnetic encoder (Hall sensor) is used instead of a potentiometer. With precision preloaded gears with minimal backlash and a flat 7.5mm-high housing, the device is particularly suitable for aileron and flap control in RC F3K gliders, small gliders and motor models with thin wing profiles, such as F5D models for pylon racing. To ensure excellent cooling even under heavy load, the servo is housed in an aluminum case with feet for flat mounting.
Increased supply voltage of 6.0-7.4 V (nominal).
A number of servo parameters can be programmed using the DSP-1 USB programmer/interface and a PC-based utility program:
- Dead Band: Dead band width determines the amount of change in the control signal pulse width at which the position of the servo output shaft/lever does not change. The default setting of MKS = 1 µs or 1.1 µs
- Lock: Sets the behavior of the servo when it does not receive a control signal - Holds the position corresponding to the last received signal / The motor is free, the servo does not hold any position.
- Max. Duty: This value limits the amount of duty of the motor - It limits the max. power of the servo motor.
- Pulse Upper: The lower limit of the control pulse width and the corresponding servo swing value will be limited by this value.
- Neutral: Sets the width of the control pulses in the neutral/center position of the servo.
- Pulse Upper: The upper limit of the control pulse width and the corresponding servo swing amount will be limited by this value.
- Boost: The power of the motor when starting from a standstill. The higher the value, the greater the force will start the motor.
- Left Angle: max value of servo swing to the left.
- Right Angle: max value of servo swing to the left.
- Reversion: reverses the direction of servo movement.
- Allow Uncont: If the control signal is lost, the servo will move to the set emergency position corresponding to the "Uncontrolled Position" value.
- Uncontrolled Pos: When "Allow Uncontinued" is enabled, it sets the servo's emergency position in case of signal loss.
- Uncontrolled Time: When the signal is lost, the servo will move to the emergency "Uncontrolled Position" after the "Uncontrolled Time" has elapsed.
WARNING
DO NOT attempt to rotate the servo by hand.
Since the servo gears are very precise and delicate, when installing the servo lever, do not try to slide it onto the servo output shaft - otherwise you risk damaging the gears.
Correct procedure: Place the servo lever against the groove on the servo output shaft, but do not place it on the shaft. Hold the servo lever with your fingers, then carefully screw in the lever retaining screw to slide the lever onto the output shaft.
Specifications:
- Torque at 6.0 V - 3.4 kg
- Torque at 7.4 V - 3.8 kg
- Torque at 8.2 V - 4 kg
- Speed at 6.0 V - 0.114 s / 60 degrees
- Speed at 7.4 V - 0.094 s / 60 degrees
- Speed at 8.2 V - 0.87 s / 60 degrees
- Control pulse width: 1520 µs
- Repetition rate: 333 Hz
- Ball bearings:
- Gear (pinions): metal
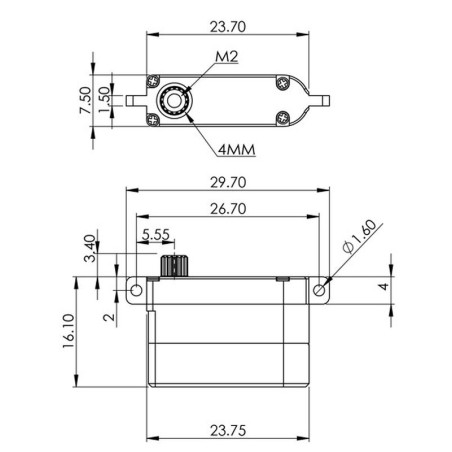
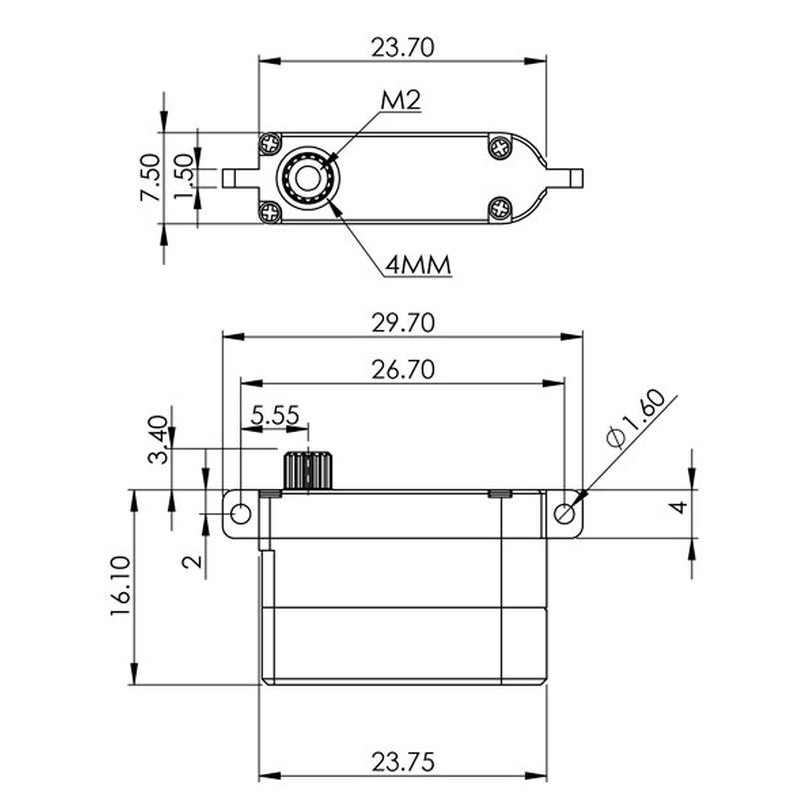
- Dimensions (length x width x height): 23.75 x 7.5 x 16.1 mm
- Weight: 7.9 g
- Motor type: coreless
*Follow the instruction manual included with the product
 Polski
Polski Čeština
Čeština English
English