Mocne i bardzo szybkie programowalne cyfrowe mikroserwo z tytanowymi kołami zębatymi i wałem wyjściowym zamontowanym na dwóch łożyskach ślizgowych; zamiast potencjometru zastosowano enkoder magnetyczny (czujnik Halla). Dzięki precyzyjnym, wstępnie naprężonym kołom zębatym z minimalnym luzem i płaskiej obudowie o wysokości 7,5 mm, urządzenie to szczególnie nadaje się do sterowania lotkami i klapami w szybowcach RC F3K, małych szybowcach i modelach silnikowych z cienkimi profilami skrzydeł, takich jak modele F5D do wyścigów pylonowych. Aby zapewnić doskonałe chłodzenie nawet przy dużym obciążeniu, serwo umieszczono w aluminiowej obudowie z nóżkami, umożliwiającymi montaż na płasko.
Podwyższone napięcie zasilania 6,0-7,4 V (nominalne).
Za pomocą programatora/interfejsu USB DSP-1 oraz programu narzędziowego na PC można zaprogramować szereg parametrów serwomechanizmu:
- Dead Band: Szerokość strefy martwej określa wielkość zmiany szerokości impulsu sygnału sterującego, przy której położenie wałka/dźwigni wyjściowej serwomechanizmu nie ulega zmianie. Ustawienie domyślne MKS = 1 µs lub 1,1 µs
- Lock: Ustawianie zachowania serwomechanizmu, gdy nie otrzyma sygnału sterującego - Utrzymuje pozycję odpowiadającą ostatnio otrzymanemu sygnałowi / Silnik jest swobodny, serwomechanizm nie utrzymuje żadnej pozycji.
- Max. Duty: Wartość ta ogranicza ilość obowiązków silnika - ogranicza ona maks. moc silnika serwo.
- Pulse Upper: Dolna granica szerokości impulsów sterujących i odpowiadająca jej wartość wychylenia serwomechanizmu będą ograniczone tą wartością.
- Neutral: Ustawia szerokość impulsów sterujących w położeniu neutralnym/środkowym serwomechanizmu.
- Pulse Upper: Górny limit szerokości impulsów sterujących i odpowiadająca mu wielkość wychylenia serwomechanizmu będą ograniczone tą wartością.
- Boost: Moc silnika przy ruszaniu z miejsca. Im większa wartość, tym większa siła uruchamia silnik.
- Left Angle: maks. wartość wychylenia serwa w lewo.
- Right Angle: maks. wartość wychylenia serwa w lewo.
- Reversion: Odwraca kierunek ruchu serwomechanizmu.
- Allow Uncont: W przypadku utraty sygnału sterującego serwo przejdzie do ustawionej pozycji awaryjnej odpowiadającej wartości „Pozycji niekontrolowanej”.
- Uncontrolled Pos: Gdy włączona jest opcja „Zezwalaj na niekontynuację”, ustawia pozycję awaryjną serwomechanizmu w przypadku utraty sygnału.
- Uncontrolled Time: W przypadku utraty sygnału serwo przejdzie do awaryjnej „pozycji niekontrolowanej” po upływie „czasu niekontrolowanego”.
OSTRZEŻENIE
NIE próbuj obracać serwomechanizmu ręcznie.
Ponieważ koła zębate serwa są bardzo precyzyjne i delikatne, podczas montażu dźwigni serwa nie należy próbować wsuwać jej na wałek wyjściowy serwa – w przeciwnym razie istnieje ryzyko uszkodzenia kół zębatych.
Prawidłowa procedura: Umieść dźwignię serwa przy rowku na wałku wyjściowym serwa, ale nie umieszczaj jej na wałku. Przytrzymaj dźwignię serwa palcami, a następnie ostrożnie wkręć śrubę mocującą dźwignię, aby nasunąć dźwignię na wałek wyjściowy.
Dane techniczne:
- Moment obrotowy przy 6,0 V - 3,4 kg
- Moment obrotowy przy 7,4 V - 3,8 kg
- Moment obrotowy przy 8,2 V - 4 kg
- Prędkość przy 6,0 V - 0,114 s / 60 stopni
- Prędkość przy 7,4 V - 0,094 s / 60 stopni
- Prędkość przy 8,2 V - 0,87 s / 60 stopni
- Szerokość impulsu sterującego: 1520 µs
- Częstotliwość powtarzania: 333 Hz
- Łożyska kulkowe:
- Przekładnia (zębatki): metalowa
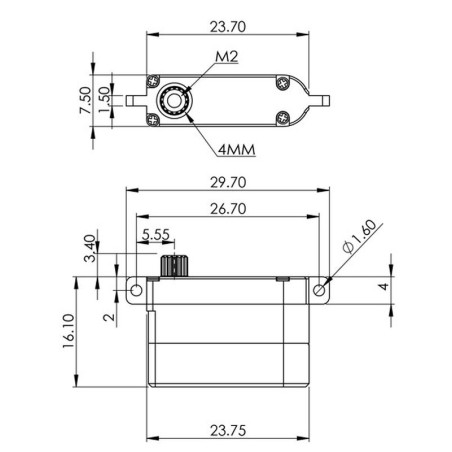
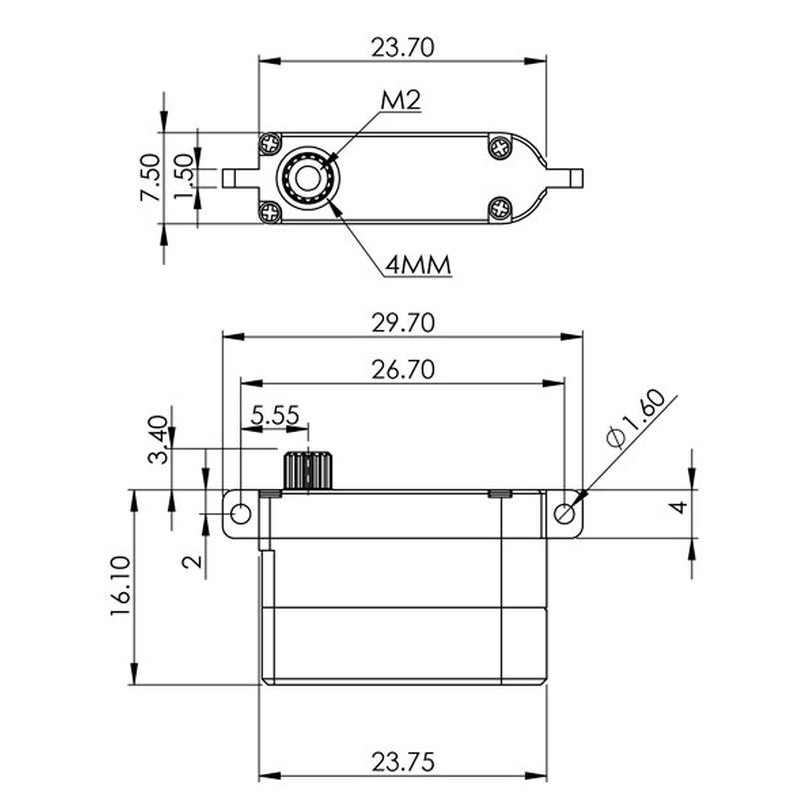
- Wymiary (długość x szerokość x wysokość): 23,75 x 7,5 x 16,1 mm
- Waga: 7,9 g
- Typ silnika: bezrdzeniowy
*Postępuj zgodnie z załączoną do produktu instrukcją obsługi
 Polski
Polski Čeština
Čeština English
English