Polski
Polski Čeština
Čeština English
English
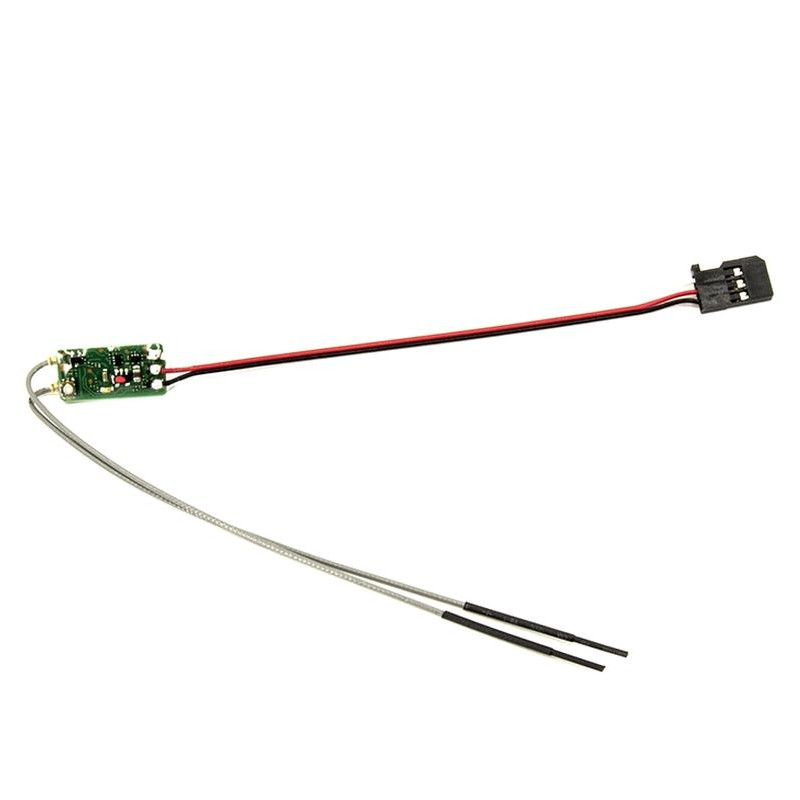
Miniaturowy i bardzo lekki odbiornik systemu transmisji Futaba S-FHSS 2,4 GHz bez telemetrii z parą anten różnicowych o pełnym zasięgu. Przeznaczony jest głównie do stosowania w dronach FPV i innych modelach wykorzystujących jednostki sterujące komunikujące się poprzez magistrale S.BUS; dzięki swoim miniaturowym wymiarom i bardzo małej wadze nadaje się również do małych modeli samolotów z serwami S.BUS/S.BUS2. R2000SBM zapewnia jedno wyjście szeregowe S.BUS. Stany pracy odbiornika sygnalizowane są za pomocą diody LED.
System transmisji
Futaba S-FHSS 2,4GHz dla modeli latających (dla nadajników Futaba S-FHSS i modułu RF TN-FH).
Zasilanie
4,8-7,4 V (napięcie nominalne) – czyli np. akumulatory 4-6 NiMH, 2S LiPo, LiFe, Li-ion, stabilizatory mocy BEC w danym zakresie napięć.
Antena
Odbiornik jest wyposażony w parę anten różnicowych, aby zmaksymalizować odbiór sygnału niezależnie od względnego położenia modelu i nadajnika. Należy je zamocować w modelu z zachowaniem wzajemnej orientacji 90°.
Wyjścia odbiornika
Odbiornik wyposażony jest w trójżyłowy kabel wyjściowy S.BUS ze złączem serwo typu Futaba. Wyjście S.BUS posiada maksymalnie 8 kanałów.
Telemetria
R2000SBM nie umożliwia transmisji danych telemetrycznych, umożliwia jednak przesłanie danych o sile odebranego sygnału (RSSI) do jednostki sterującej drona.
Co to jest S.BUS2/S.BUS
S.BUS – magistrala szeregowa Futaba z jednokierunkową komunikacją umożliwiająca sterowanie serwami, sterownikami, przełącznikami, żyroskopami i innymi kompatybilnymi urządzeniami RC podłączonymi do jednego portu wyjściowego odbiornika S.BUS.
S.BUS2 - Magistrala szeregowa Futaba do dwukierunkowej komunikacji umożliwiająca (tak jak S.BUS) sterowanie serwami, sterownikami, przełącznikami, żyroskopami i innymi kompatybilnymi urządzeniami RC podłączonymi do jednego portu wyjścia/wejścia odbiornika S.BUS2. Dodatkowo umożliwia podłączenie czujników telemetrycznych i przesłanie z nich danych poprzez odbiornik w celu wyświetlenia na nadajniku; z niektórych serw S.BUS2 może przesyłać do nadajnika informacje o prądzie pracy, temperaturze czy kącie wychylenia dźwigni wyjściowej serwa.
W przeciwieństwie do klasycznych zestawów RC, system S.BUS(2) wykorzystuje szeregową komunikację danych do przesyłania sygnałów sterujących z odbiornika do serwa, żyroskopu lub innego urządzenia. Dane te zawierają polecenia takie jak „przesuń serwo kanału 3 o 15 stopni, przesuń serwo kanału 5 o 30 stopni” dla wielu urządzeń. Urządzenia S.BUS(2) wykonują tylko polecenia należące do ich własnego ustawionego kanału. Z tego powodu możliwe jest podłączenie kilku serwomechanizmów do tego samego kabla sygnałowego, ustawiając je i sterując indywidualnie w zależności od potrzeb. Służy do tego kod identyfikacyjny serwa (ID). Identyfikator znajdziesz na naklejce na skrzynce serwa.
Serwo S.BUS2 można podłączyć do portów S.BUS2 i S.BUS odbiornika. O jego funkcji decyduje ustawienie kanału w pamięci serwa (odbywa się to za pomocą interfejsu programowania nadajnika Futaba, programatora SBC-1 lub interfejsu USB CIU-3 z programem PC S-Link - w przypadku niektórych serwomechanizmów kanał można ustawić wyłącznie za pomocą nadajnika).
Serwo S.BUS lub S.BUS2 podłączone do wyjścia kanału klasycznego odbiornika (PWM) działa jak klasyczne serwo. Jego ruch sygnalizowany jest sygnałem w kanale odbiornika, do którego jest podłączony. Ustawienia programowalnych funkcji serwa pozostają w mocy.
Dane techniczne:
*Postępuj zgodnie z załączoną do produktu instrukcją obsługi.